We are very proud to announce that SkyEye Team won the third place of the Grand Challenge in the Mohamed Bin Zayed International Robotics Challenge MBZIRC2020 that took place in February 2020 in Abu Dhabi.
Real-time model-free optimal autotuning method for unmanned aerial vehicle controllers based on Fibonacci-search algorithm

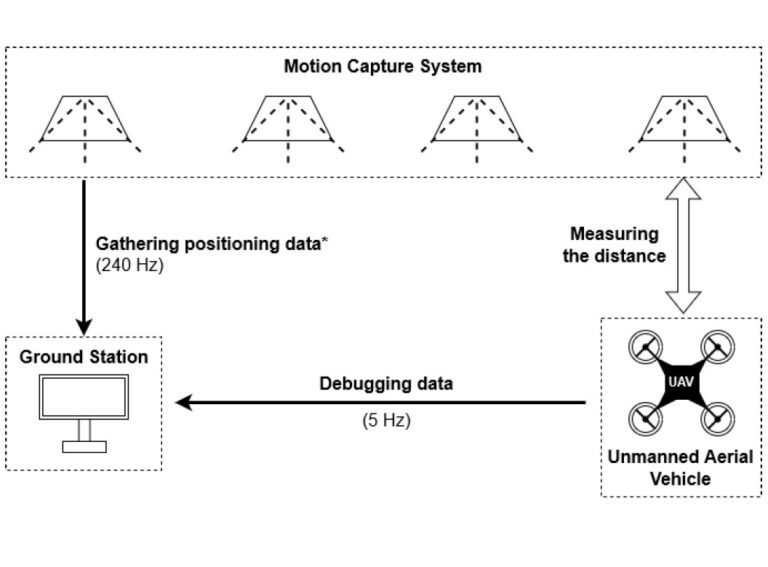
Experiment in ROS conducted for the hexacopter UAV (developed for Mohamed Bin Zayed International Robotics Challenge 2017 – MBZIRC 2017)